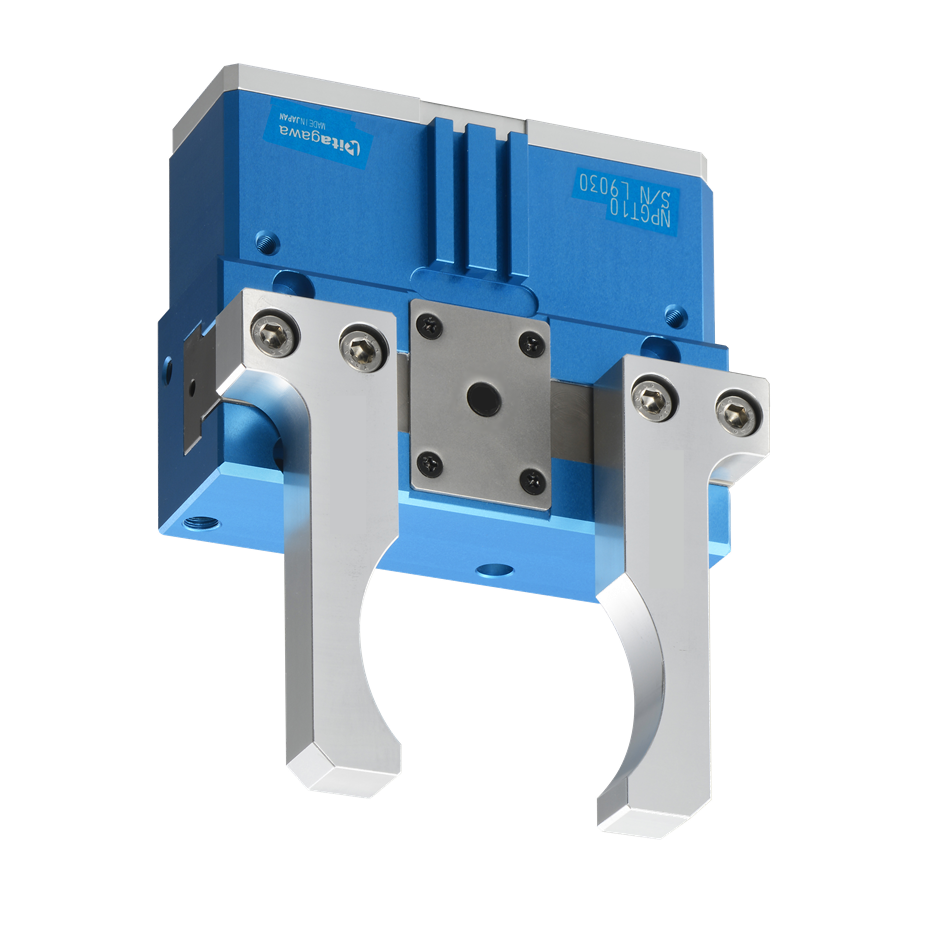
Robot hand
为确保气压下降时,工件不会立刻脱落,请在空气回路中使用单向阀。
本体附属气缸引导开关开关支架,可将气缸引导开关安装在本体外周的凹槽上。
如果想要使用接近开关直接检测卡爪行程,请另外购买接近开关支架。
| 型号 | (mm) |
(mm) |
(kg) |
(MPa) |
(℃) |
||||
|---|---|---|---|---|---|---|---|---|---|
L |
(N) |
(N) |
|||||||
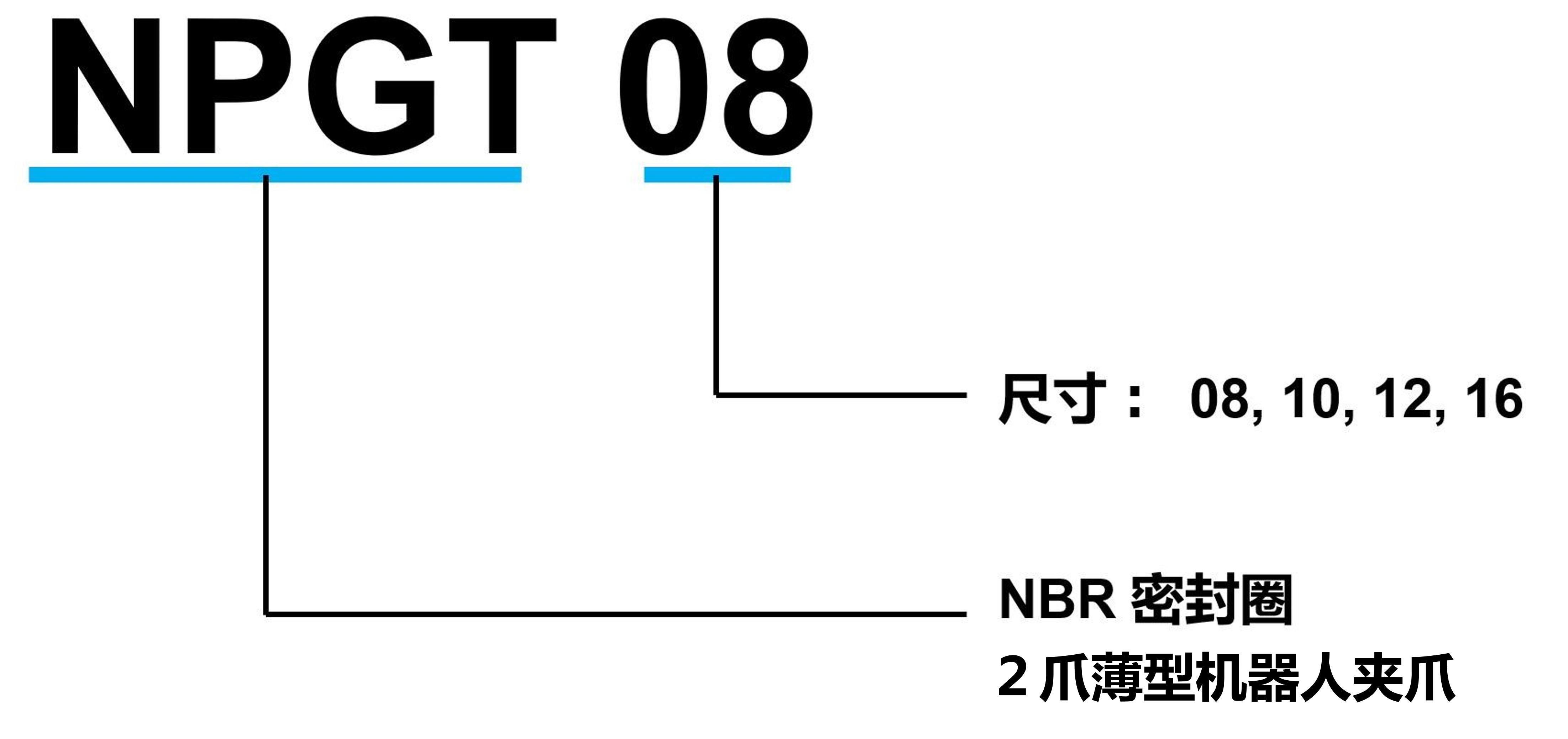
| NPGT08 | 16.6 | 10 | 600 | 500 | ±0.008 | 0.79 | 34 | 0.2~0.8 | 5~60 |
| NPGT10 | 20.8 | 10 | 1000 | 860 | ±0.008 | 1.25 | 64 | 0.2~0.8 | 5~60 |
| NPGT12 | 26.4 | 10 | 2000 | 1700 | ±0.008 | 2.45 | 152 | 0.2~0.8 | 5~60 |
| NPGT16 | 32.6 | 10 | 2800 | 2650 | ±0.008 | 4.60 | 524 | 0.2~0.8 | 5~60 |
(注1)供气气压为0.6MPa。
(注2)本测定距离是指,爪座上端平面中心点到夹持中心点的距离。
各机械夹爪的容许负荷可点击下面的链接进行确认。
点击型号后查看夹持力表。夹持力F是每个卡爪实际夹持力F1与卡爪数量的乘积
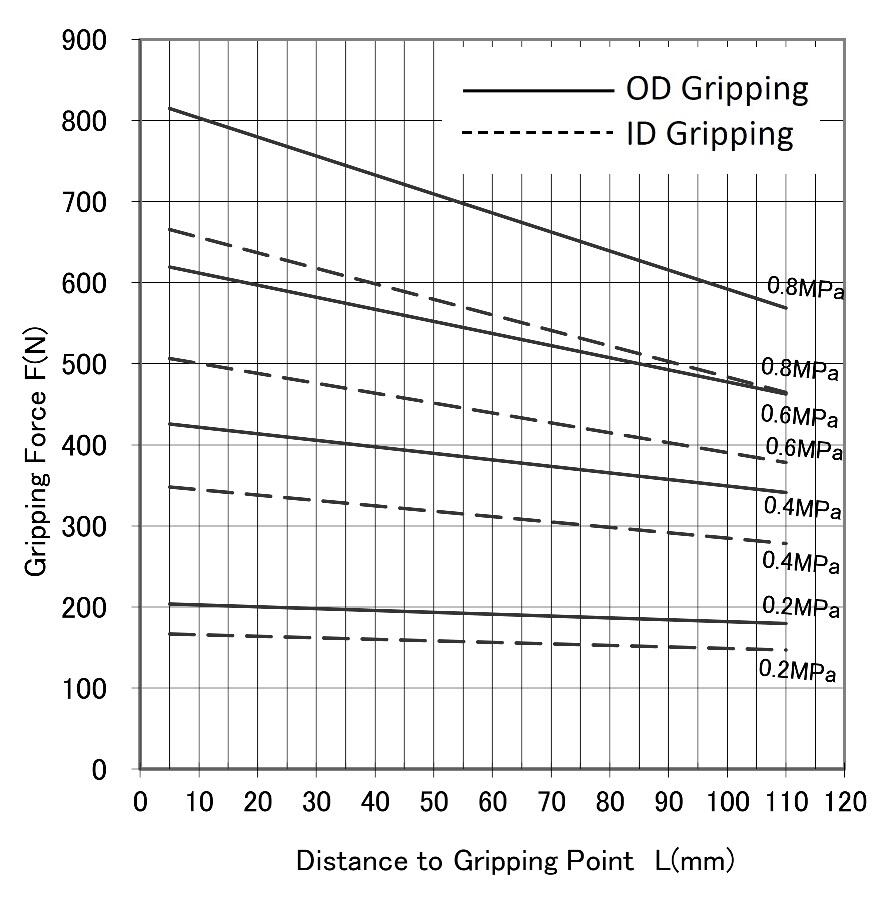
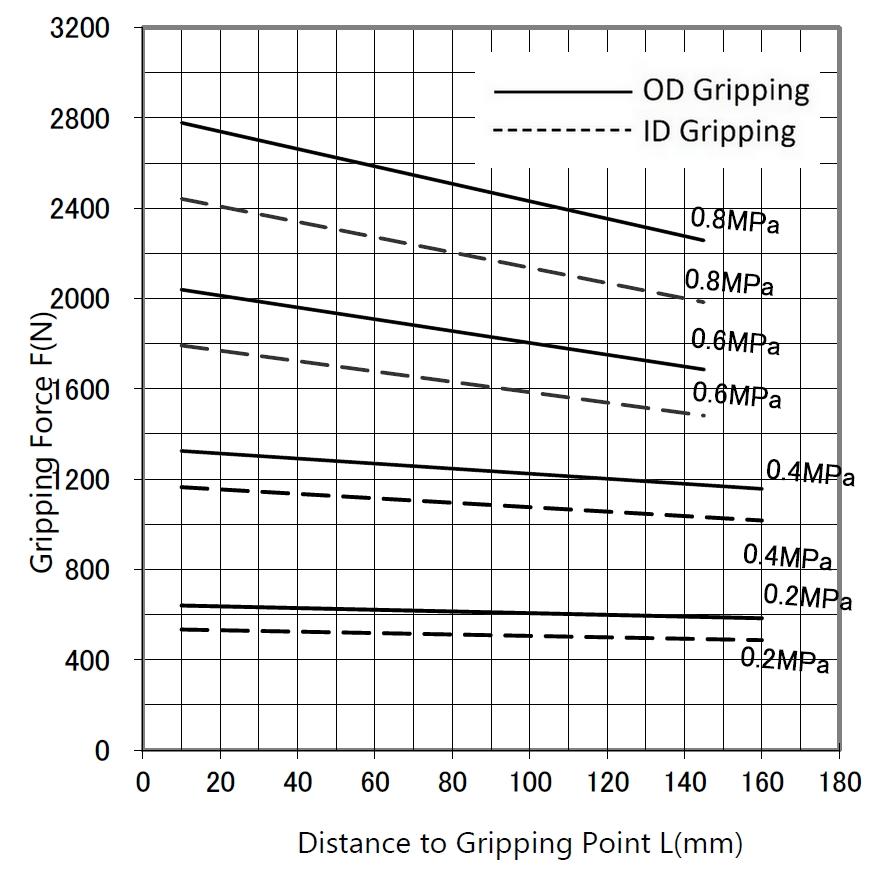
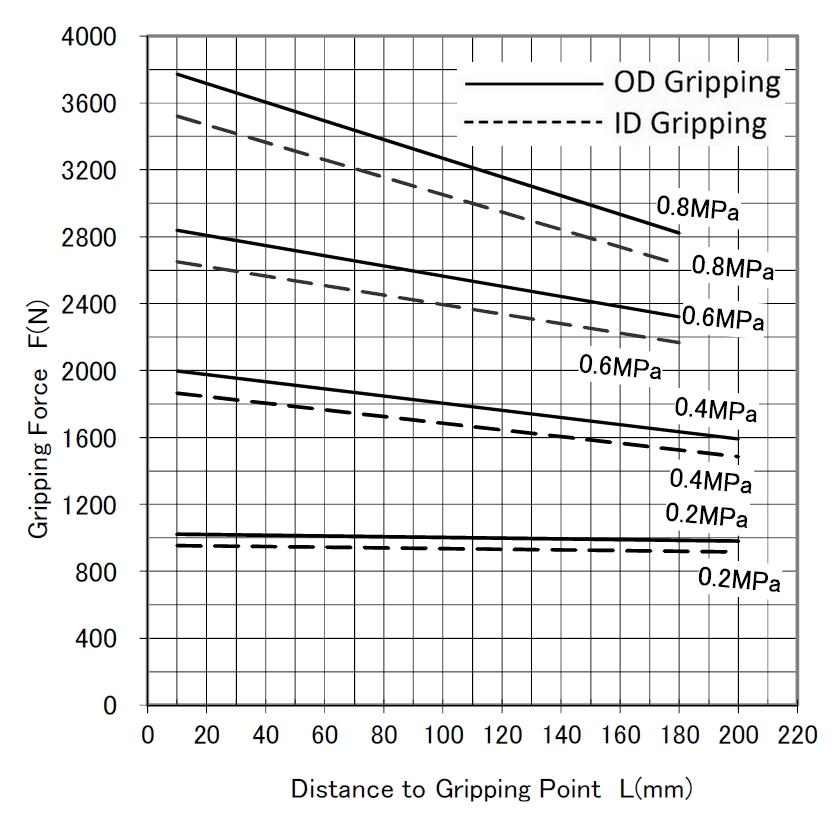
根据机械卡爪型号、气压和其他夹持条件计算夹持力。
点击此处计算夹持力
拥有多种型号, 世界的标准强力卡盘。

超群的锁紧力. 安定性特殊对应卡盘。

多品种. 少量生产用手动锁紧卡盘。


品质管理和安全作业的 必需品。

发挥卡盘高性能的 回转油缸。
紧凑.与高精度卡盘 组合更适合。

顶尖尾座,圆盘式尾座, 传动螺杆及其他。

采用屈臂联轴机构, 大开口虎爪。


气.油缸内藏, 替代夹具的轻便夹盘。

Kitagawa标准的高品质, 高耐久机械卡爪。
工厂自动化,无人化的最佳搭档

各种目录可以下载


介绍生产中止产品的 明细型号